

BayEOS
BayCEER Umweltdatenerfassungssystem
Überwachen der Stromversorgung mit BayEOS
oliver.archner@bayceer.uni-bayreuth.de
02.06.2018
Eine gesicherte Stromversorgung ist für eine lückenlose Aufzeichnung von Messwerten unerlässlich. An Standorten mit einer Netzversorgung von 230V dienen sog. unterbrechungsfreie Stromversorgungen (USV) zur Überbrückung von kurzen Stromausfällen und zur Sicherung der Geräte vor Spannungsspitzen.
In dieser Anleitung zeigen wir ihnen, wie sie eine USV mit einem Raspberry Pi überwachen und den Status an ein BayEOS Gateway senden. Auf Grundlage der Gateway Daten lassen sich im Anschluss Dienste wie z.B. eine automatische Benachrichtigung aufbauen.

BayEOS Package Repository Konfiguration
- Key Import
wget -O - http://www.bayceer.uni-bayreuth.de/repos/apt/conf/bayceer_repo.gpg.key |apt-key add - - Eintrag für Repository in /etc/apt/sources.list
deb http://www.bayceer.uni-bayreuth.de/repos/apt/debian stretch main - Repository cache akualisieren
apt-get update
Software Installation
Für den Zugriff auf das Gerät setzen wir Teile des NUT Projekts ein und ergänzen Sie um die beliebten BayEOS Packages script-run und bayeosgatewayclient.
apt-get install nut python-nut python-bayeosgatewayclient script-run
Verbinden der USV mit dem Raspberry Pi
Wir verbinden die USV über das USB Kabel mit dem Raspberry Pi und kontrollieren anschließend mit lsusb, ob ein neues Device angelegt wurde.
root:# lsusb
Bus 001 Device 005: ID 051d:0002 American Power Conversion Uninterruptible Power Supply
NUT Daemon
- Um ein Gerät in das NUT System aufzunehmen, registrieren wir es in der Datei
/etc/nut/ups.conf[apc700] driver = usbhid-ups port = auto desc = "Back-UPS ES 700G" - Eventuell müssen wir die Zugriff-Rules anpassen:
cp /lib/udev/rules.d/62-nut-usbups.rules /etc/udev/rules.d/reboot - Wir definieren den Standalone Mode in der Datei
/etc/nut/nut.confMODE=standalone - Jetzt können wir den Daemon mit dem Kommando:
upsdrvctl startstarten - Eine erste Abfrage über das Tool
upscgibt uns den Gerätestatus aus:root# upsc apc700@localhost Init SSL without certificate database battery.charge: 100 battery.charge.low: 10 battery.charge.warning: 50 battery.date: not set battery.mfr.date: 2010/06/19 battery.runtime: 2625 battery.runtime.low: 120 battery.type: PbAc battery.voltage: 13.4 battery.voltage.nominal: 12.0 device.mfr: APC device.model: Back-UPS ES 700G device.serial: 3B1025X40366 device.type: ups driver.name: usbhid-ups driver.parameter.pollfreq: 30 driver.parameter.pollinterval: 2 driver.parameter.port: auto driver.parameter.synchronous: no driver.version: 2.7.4 driver.version.data: APC HID 0.96 driver.version.internal: 0.41 input.sensitivity: medium input.transfer.high: 266 input.transfer.low: 180 input.voltage: 230.0 input.voltage.nominal: 230 ups.beeper.status: enabled ups.delay.shutdown: 20 ups.firmware: 871.O2 .I ups.firmware.aux: O2 ups.load: 0 ups.mfr: APC ups.mfr.date: 2010/06/19 ups.model: Back-UPS ES 700G ups.productid: 0002 ups.serial: 3B1025X40366 ups.status: OL ups.timer.reboot: 0 ups.timer.shutdown: -1 ups.vendorid: 051d - Wir ergänzen den Systemstart mit
update-rc.d nut-server defaults
Polling Skript
Ein polling Skript fragt alle zehn Sekunden den Gerätestatus ab und sendet ihn bei einer Änderung an ein Gateway. Wir wandeln die Variable upc.status in Textmeldungen um und senden die Werte der Variablen battery.charge und input.voltage als Float-Index Frames (0x41) an ein Gateway.
Python-Skript
Datei /usr/local/bin/usv.py
#!/usr/bin/python from bayeosgatewayclient import BayEOSWriter, BayEOSSender from time import sleep import PyNUT PATH = '/tmp/bayeos/usv' NAME = 'Back-UPS-ES-700G' URL = 'http://bayconf.bayceer.uni-bayreuth.de/gateway/frame/saveFlat' # Defintion: https://networkupstools.org/docs/developer-guide.chunked/ar01s04.html STATUS_DIC = {"OL":"on mains", "OB":"on battery", "LB":"low battery", "HB":"high battery", "RB":"replace battery", "CHRG":"battery is charging", "DISCHRG":"battery is discharging", "BYPASS":"bypass circuit is active", "CAL":"calibrating", "OFF":"offline", "OVER":"overloaded", "TRIM":"trimming incoming voltage", "BOOST":"boosting incoming voltage", "FSD":"forced shutdown"} writer = BayEOSWriter(PATH) sender = BayEOSSender(PATH, NAME, URL) sender.start() status = None voltage = None charge = None flush = False while True: nut = PyNUT.PyNUTClient() ups = nut.GetUPSVars(UPS) new_status = ups['ups.status'] if new_status != status: status = new_status msg = "Status:" + ", ".join([STATUS_DIC[x] for x in status.split()]) writer.save_msg(msg) flush = True new_voltage = float(ups['input.voltage']) if new_voltage != voltage: voltage = new_voltage write.save([[1,voltage]],value_type=0x41) flush = True new_charge = float(ups['battery.charge']) if new_charge != charge: charge = new_charge writer.save([[2,charge]],value_type=0x41]) flush = True if flush: writer.flush() flush = False del nut sleep(10)
Skript Start
Ein Eintrag in der Datei /etc/script-run.conf stellt sicher, dass das Skript beim System-Start aufgerufen wird. Beendet ein nicht abgefanger Fehler unser Skript, wird es automatisch neu gestartet. Auf diese Weise können wir die Implementierung aufwendiger Fehlerbehandlungsroutinen vernachlässigen.
## SCRIPT-SECTION
## use one line per script
/usr/local/bin/usv.py
Funktionskontrolle
-
Wir starten den Raspberry Pi mit dem
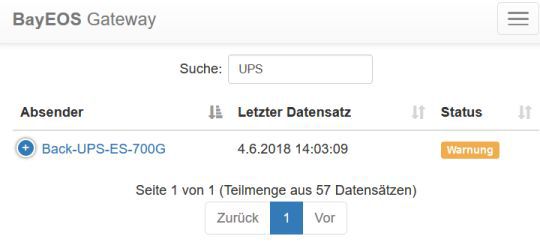
rebootBefehl und öffnen anschließend die Weboberfläche des Gateway -
Eine Suche über den Origin 'UPS' findet ein neues Gerät
-
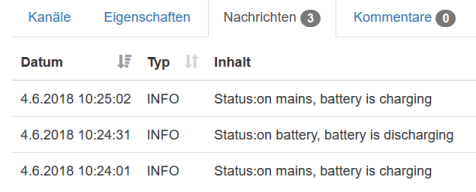
Auf der Registrierkarte 'Nachrichten' können wir die Statusmeldungen kontrollieren:
-
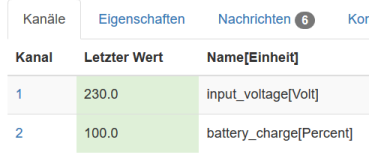
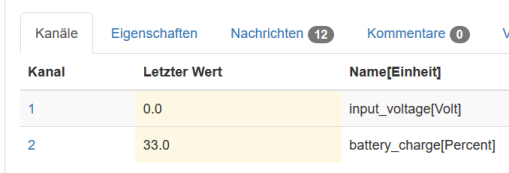
Die Messwert der Variablen finden wir auf der Registrierkarte 'Kanäle':
-
Jetzt definieren wir für beide Kanäle die folgenden Statussgrenzen auf dem Gateway:
Kanal Min. Fehler Min. Warnung input_voltage 220 battery_voltage 30 50 -
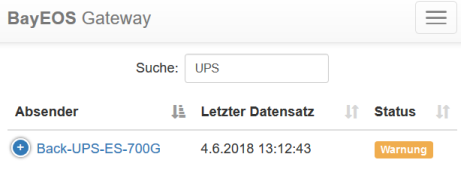
Unterbrechen wir die Stromversorgung der USV, können wir den Statuswechsel von 'Ok' nach 'Warnung' bis zu 'Kritisch' in der Gateway Hauptansicht live mitverfolgen:
-
Die Kanalansicht zeigt die Kanalwerte jetzt je nach Status farblich hervorgehoben:
Nächste Schritte
- Konfiguration der automatischen Benachrichtigung per E-Mail auf Basis des Nagios-Plugins
- Erstellen eines Skripts zur Statusabfrage per HTTP GET auf dem Gateway mit automatischer E-Mail Benachrichtigung im Fehlerfall.